
2017
Metal wheels rolling!
Our first rover featured a 6 wheel design with a modified rocker bogie suspension system. With custom manufactured aluminium wheels, this rover could easily navigate moderately hard to rocky terrain with ease. The manipulator was mounted on 2 separate points on the chassis to improve the stability of the rover and provide better weight distribution. In our debut attempt, we qualified for URC 2017, eventually finishing 29th out of 70+ teams from across the world.
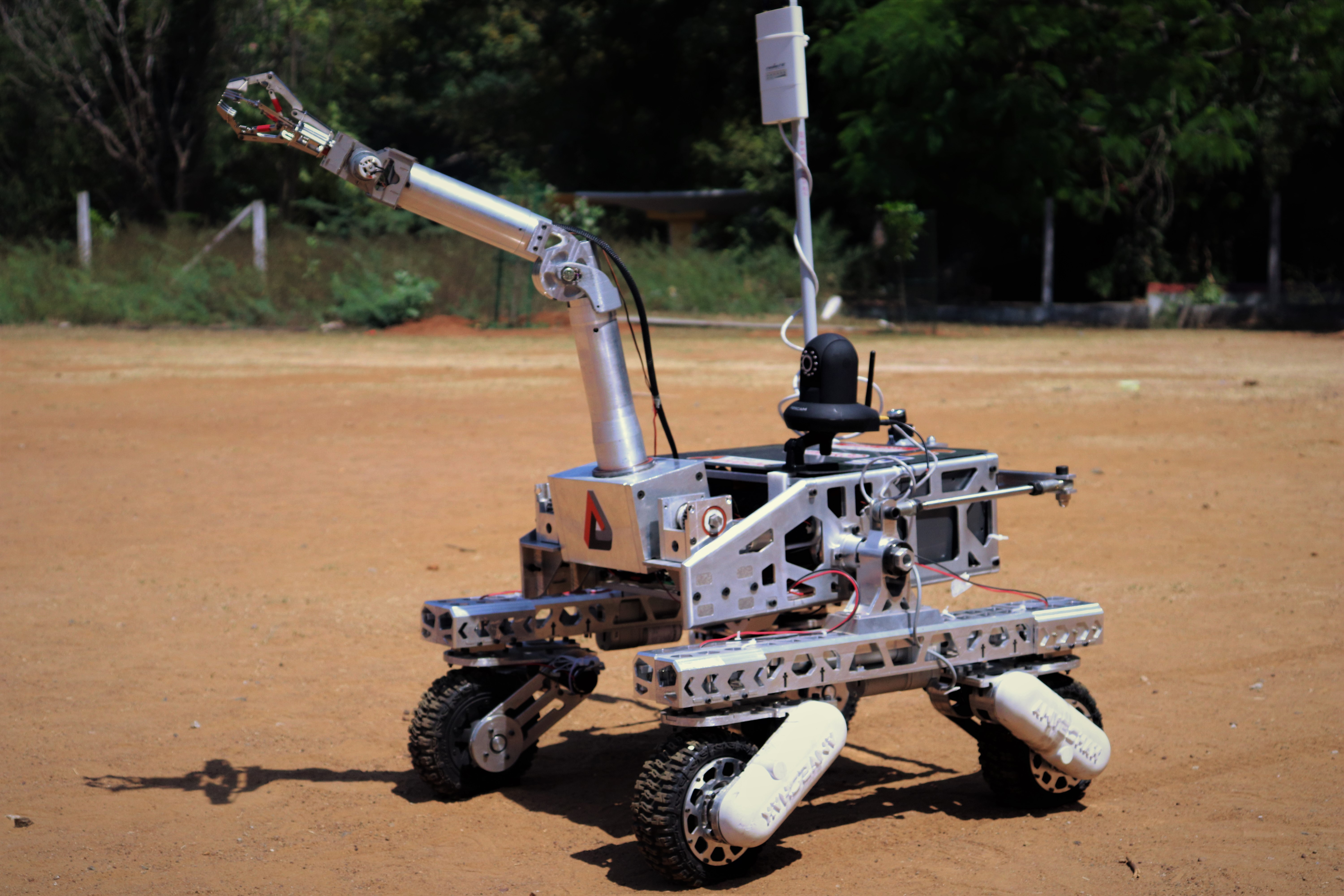
2018
Cuteness overloaded..
New rover design shifted to a 4 wheel design that saw the implementation of a steering mechanism and a bar differential to stabilize the chassis box. The manipulator was designed to be modular and the gripper was completely fastener free. We reached the 25th position in URC 2018, a steady improvement from URC 2017, while our innovative designs were highly appreciated by other teams & judges.
From qualifying to participate in the European Rover Challenge(ERC) 2016 to actually finishing in the top 25 positions in University Rover Challenge(URC) 2018, we as a team have grown at a rapid pace & have learned & improved at each stage. In Our long term vision, we hope to collaborate with the top research organizations of India such as the Indian Space Research Organization(ISRO) & the Defense Research & Development Organization(DRDO) in building truly world class technologies for all.

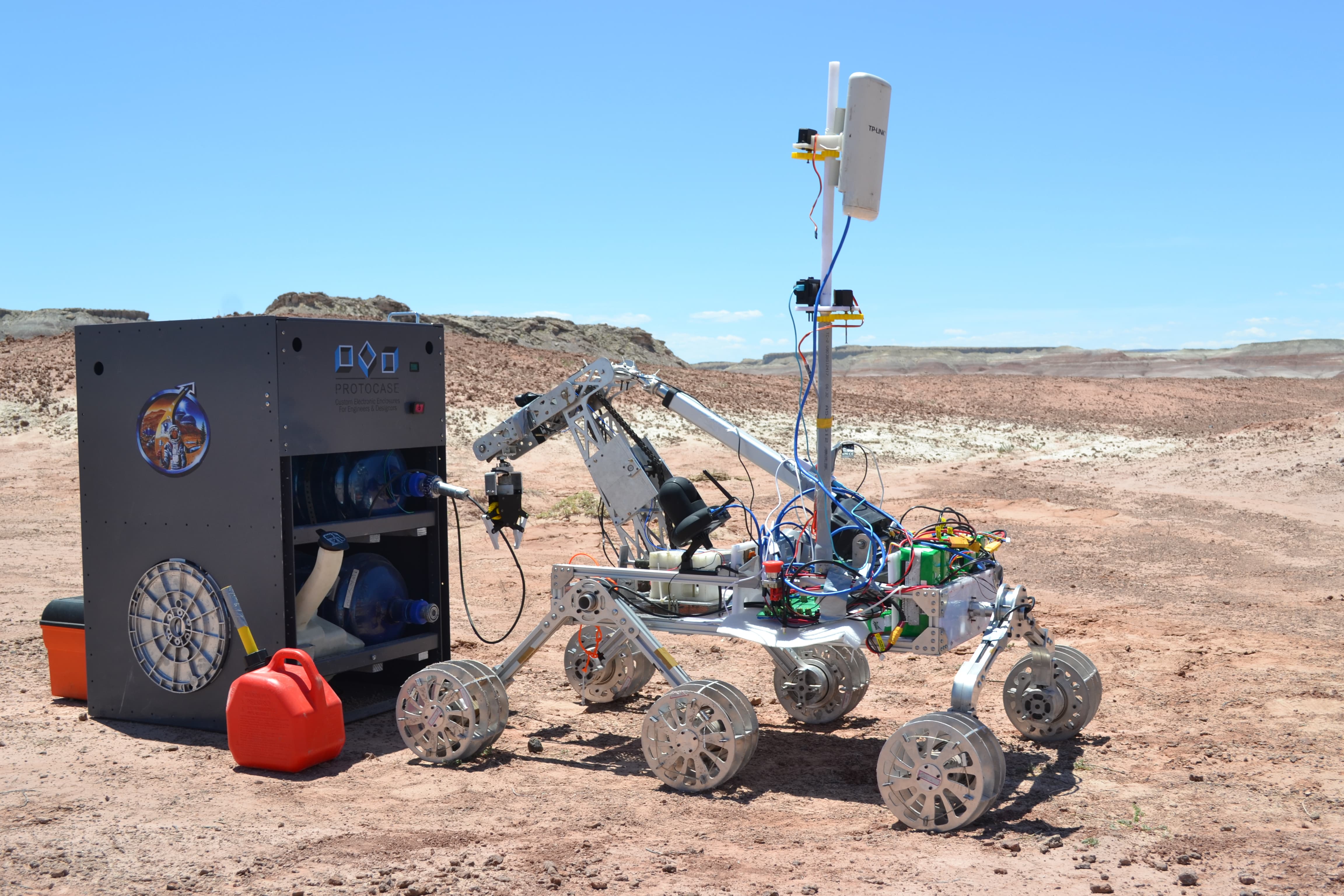
2019
Robust. Compact. Simple.
Our new rover, Caesar, is a 6 wheeled rocker bogie with custom made wheels and an amazing ground clearance of 40 cm. The new, lightweight manipulator holds an end effector with adaptive fingers, capable of wrapping around objects of all shapes and sizes. The state of the art electronic system makes sure that the rover is able to operate seamlessly and reliably. The new software core improves the autonomous capabilities and the ease of controlling the rover.

2020
Why so serious?
Dark Knight, is a marked improvement over the previous iterations. The new design is our largest yet, and is significantly more robust. We placed an emphasis on modularity and stability. The rover has a wider base area and an arm with a larger workspace. The electronics are also modularized, allowing for faster debugging and reliability. In addition, the system architecture was optimized and faster algorithms were implemented in order to improve performance.
2022
Post Pandemic ray of Hope.
After a two-year break due to COVID-19, we returned to our institution to continue the Anveshak journey.Despite this challenges, we were determined to upgrade our previous rover. We upgraded our arm by using two linear actuators, demonstrating our resourcefulness and commitment to innovation despite the setbacks we faced.
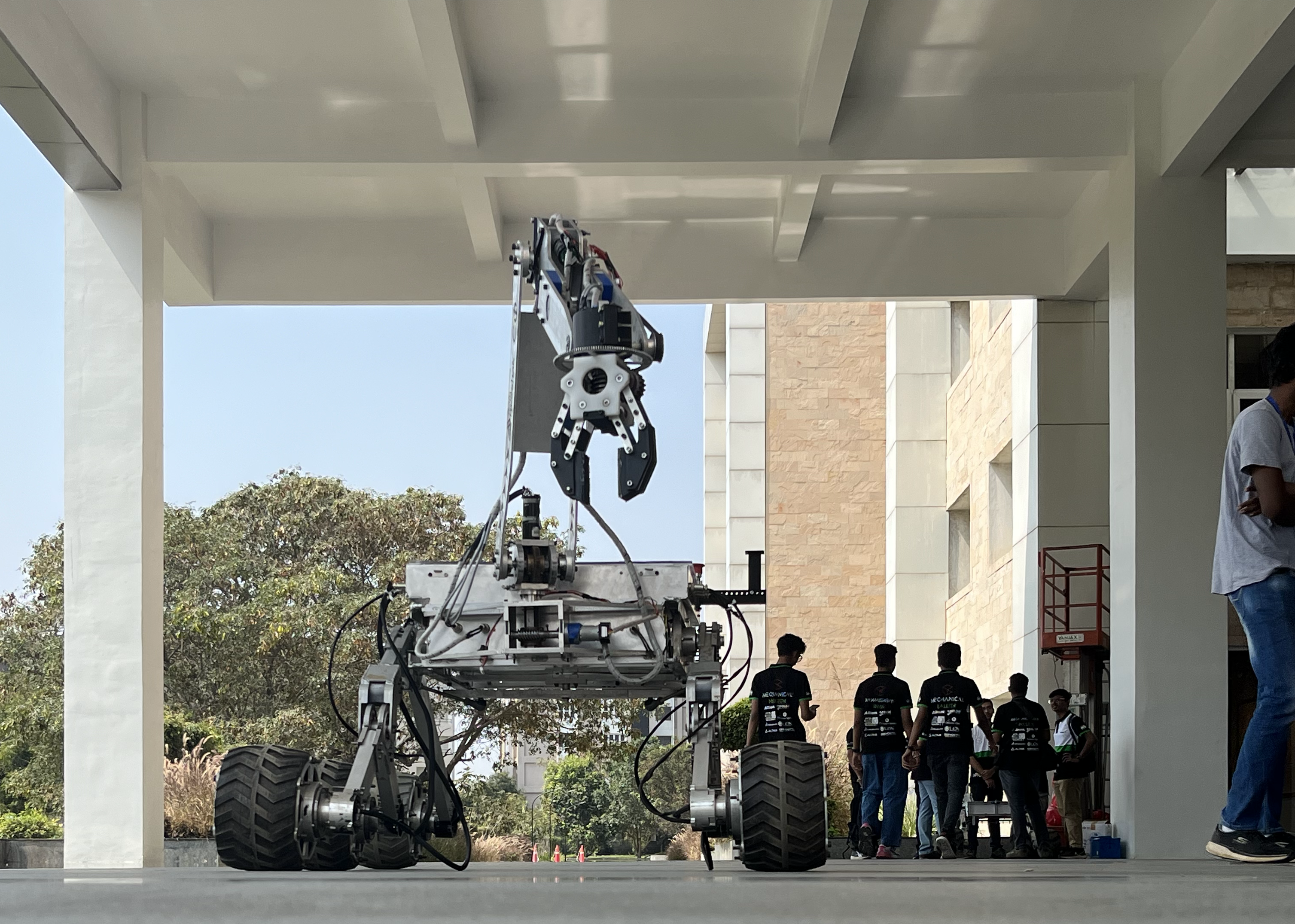
2023
Anveshak Rises
Galileo comes as an enhanced iteration of our preceding 6-wheeled rovers, specifically designed to address the prevalent camber-related challenges encountered during traversal. Moreover, we have substantially augmented the ground clearance to facilitate superior navigation across obstacles. In pursuit of an expanded work-envelope, we have transitioned from linear actuators to worm gears for the precise manipulation of the shoulder and elbow joints, enabling a heightened range of motion. The implementation of worm gear technology has facilitated the utilization of friction gripping in the rover's gripper system. This advanced gripping mechanism employs 3D printed flexible fingers composed of thermoplastic polyurethane (TPU), ensuring enhanced dexterity and adaptability. Furthermore, the wire management within the rover has been significantly enhanced through the integration of newly developed easily detachable modular connectors, optimizing efficiency and facilitating streamlined maintenance.

2024
Coming Soon....
Coming up